
Guide2track has developed a mathematical model, describing belt wandering effects depending on roller orientation and shape. The model can be applied to web guiding in general (thin film, foil etc.). In practice, due to positioning and manufacturing tolerances, roller misalignment and shape errors can never be completely avoided, which will cause belt wandering. The wandering effect may be almost not noticeable per roller rotation, but will cumulate over time and if nothing has been put in place to stop this process, the belt edge will finally run into the machine frame or other machine components. In active belt steering systems, roller orientation is changed on purpose, to keep a belt in track. The model can indeed also be used to investigate this situation.
The reason this model has been developed is, to understand belt tracking phenomena in more detail, which helps in developing the Centrack system, identifying alternative tracking solutions, performing root cause analysis on tracking issues, performing trend analysis and other belt tracking related activities.
The model can be applied to conventional conveyor systems and to the Centrack system. Both a static and dynamic model have been built for this and the influence of the level of belt tension has been included in the model. A tensioned belt wrapped around rollers that are not orientated parallel or not perfectly cylindrical will be subject to bending moments so will assume a curved shape within the belt plane. Including the belt tension in the model is crucial since a higher belt tension will longitudinally stretch a belt which changes in-belt-plane curvature which in turn has a significant impact on the belt entry angle on the roller. This entry angle determines the transverse movement of the belt versus the roller, as can be seen from the figure below.
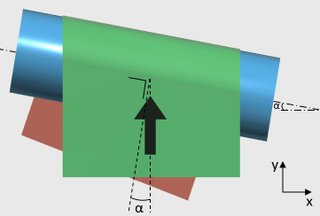
This picture is a schematic -not showing belt curvature itself- illustrating the detracking effect of a belt approaching a roller under an entry angle α. In the shown situation, the belt will wander in positive x-direction. This is because the roller circumferential speed makes the belt spirally wind around the roller.
If the belt velocity in y-direction is equal to V, the transverse belt velocity in x-direction is equal to V tan α. In reality the entry angle α is only small in which case the transverse belt velocity in x-direction approaches Vα (with α in radians). The entry angle will be affected by parameters as: roller to roller misalignment, roller shape, belt tension, belt size, material characteristics and by the interaction of the different belt strands.
Note that the entry angle deviates from the angle between the rollers and from the angle between roller and frame.
Since belt tension and shear deformation are included in the model, standard bending formulas could not be applied. Therefore it had to be looked at a different way to set up this model: it had been found that belt behavior could be well described by specific differential equations applied to each belt strand. Coupling the solutions of these equations by the boundary conditions, this system of equations could be solved.
Due to the short calculation time and ease of use, the model is excellent in generating comparisons between different belt system scenarios. With other analysis techniques, for example using classical FEA tools, such comparison would simply be too time consuming. In addition, it would be (nearly) inpossible to include the belt translation, which affects belt wandering. In the Guide2track simulation model, standard FEA software (commercially available on the market) is not used. However, for analysis of belt friction effects versus the roller, Guide2track developed a dedicated module in which an alternative type of FEA method has been implemented. The numerical results of this module are input to the belt wandering model.
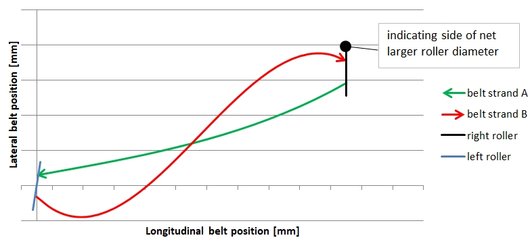
The model quantitatively determines entry angle, detracking rate, belt deformation, bending moments, belt stress, reaction moments and lateral forces on the rollers and more. Below, a result example for the case of a 2 roller system is shown.
Besides from numerical results, the model indeed also provides an in-depth qualitative understanding of the belt wandering phenomena occurring in a belt system. It points at the crucial measures how to reduce belt wandering and belt deformation. This is for example of huge importance in applications with very tight lateral precision requirements, like printers. The model shows effects, that otherwise most probably could not be detected.
The model is expected to help customers reducing their product development time and cost, by reducing the number of prototype iterations and validation time.
For additional information and prices, please feel free to contact us!








Guide2track S.àr.l. │ 20, rue Paul Wilwertz │ L-2738 Luxembourg │ info@guide2track.com │+352 691 429212
RCC Luxembourg B188855 - Business Authorization Nrs. 10048570/2, /3, /4 - VAT-ID Nr. LU 27048615 - All rights reserved
